

How To Draw 4 Dimension On Graph
I am an online writer who enjoys writing about mathematics and scientific discipline.
Canva
In this commodity we volition see how to describe a 2-dimensional representation of a four-dimensional object.

Fig. ane. The number line showing 1D infinite
Fig. 1 shows the x-centrality or number line. This is a single dimension. Whatsoever point on the line is represented past a single number (+10 or -x) that indicates its distance from the origin (0).
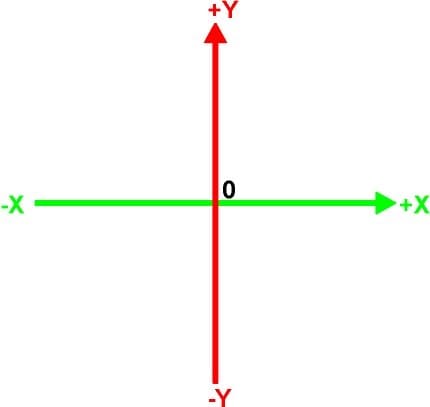
Fig. 2. Ten and Y axes of 2D space
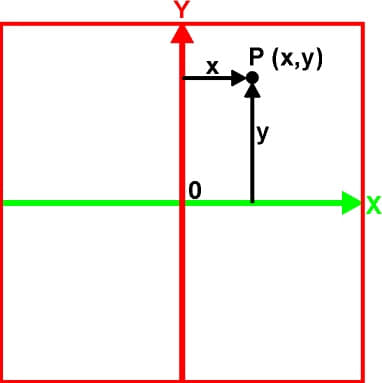
Fig. iii. One plane of 2d infinite
Fig. 3 shows the x,y plane, indicted past a square that contains the x,y axes of 2D space. These axes are 90 degrees to each other. Whatever bespeak on the plane is located past 2 numbers (10,y). 10 is the altitude from the y-axis to the indicate. Y is the distance from the x-axis to the indicate. The second coordinate system is a single plane.
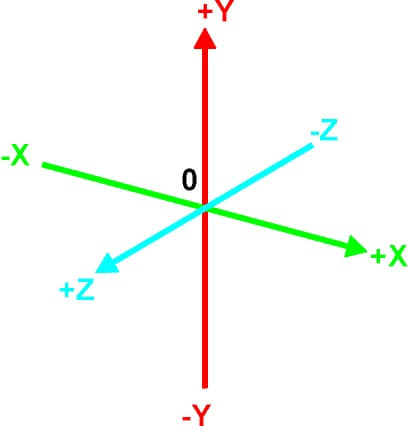
Fig. 4. The X, Y, and Z axes of 3D space
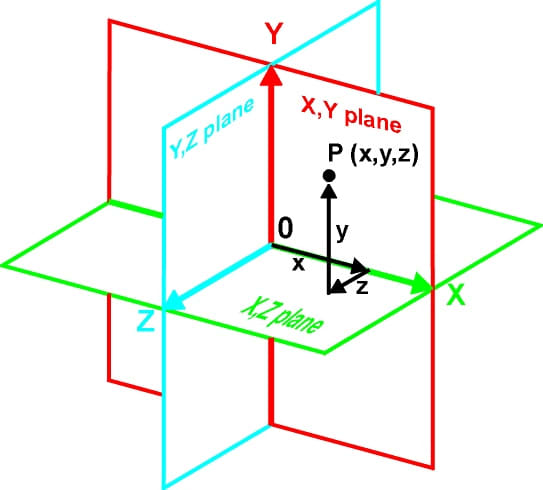
Fig. 5. The three planes of 3D space.
Any signal in 3D space is located past three numbers (x,y,z). The 3D coordinate system consists of 3 planes. Here these planes are indicated past squares and they are each 90 degrees to each other. Because we are viewing the planes at an angle and their image is flattened to the 2nd surface of the page, the squares do not wait like squares and the angles practise not appear to exist 90 degrees. However, we are used to seeing squares at an angle and can accept the drawing as representing three perpendicular squares.
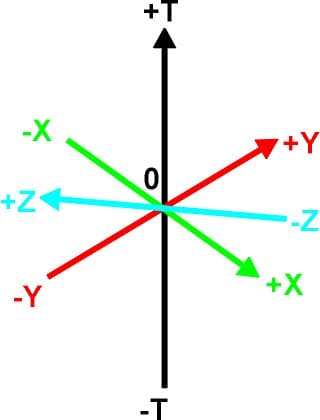
Fig. 6. The four mutually perpendicular axes of 4D space. These can represent iii spatial axes and one time axis or 4 spatial axes ten,y,z,w
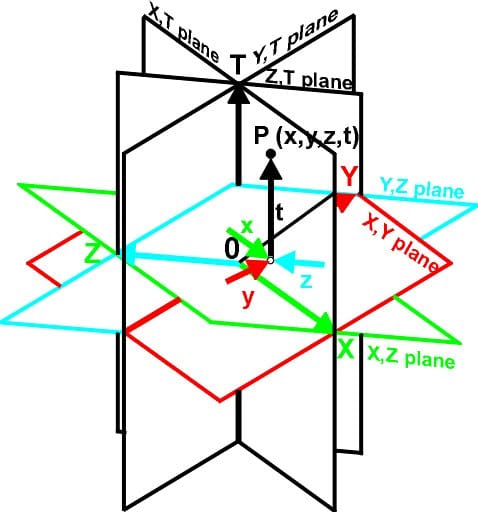
Fig. 7. The three 3D planes on their 4D axes.
The 4D coordinate system consists of six planes. This equals all the paired combinations of the axes, xy, xz, xw, yw, zw and yz. That is the number of combinations of due north objects taken r at a time = n!/r!(n-r)! = four!/two!(4-2)! = 24/four = 6.
Just as the 3D planes appear distorted when projected on a 2d surface, these planes in four dimensions are even more distorted when projected on a 2D surface. Fig. 7 shows the 2nd projection of the six planes that described 4D infinite. Whatever point in 4D space is located past four numbers (x,y,z,t). A representation of 4D infinite is like a time-exposed photograph since each 3D department occurs at a unlike instant in time. This -D space is the Minkowski space when the Lorentz transformations are used with this coordinate organization.
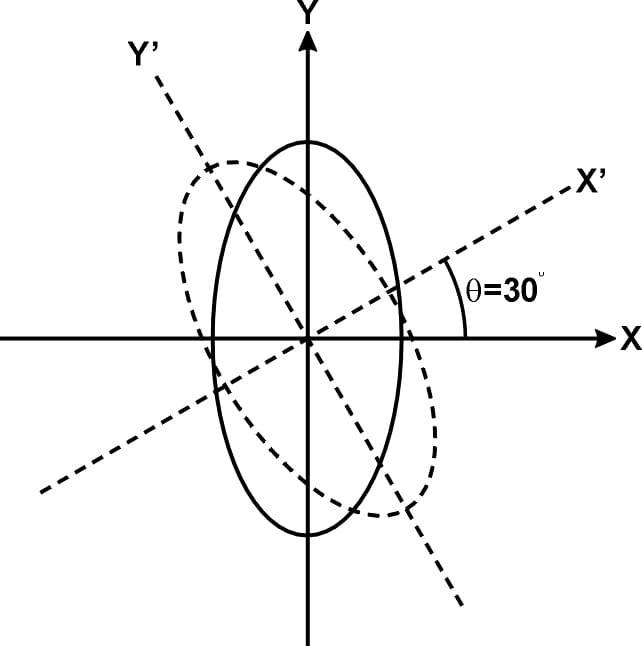
Fig eight. The rotation of a 2nd effigy on a single plane.
Read More From Feltmagnet
In analectic geometry at that place are two combined equations used for rotating all the 2nd points in an object by the angle q, on the 10,y plane. These equations are
x' = x*cos q – y*sin q
and
y' = ten*sin q +y*cos q
Using the Equations for the 3D Figure
Past expanding these two equations into six equations and using points indicated by three numbers, we produce a 2d representation of a 3D object. When 1 plane is rotated the whole figure is rotated by the same amount. By using three different angles of rotation this representation of a three-dimensional object can be viewed from any bending.
Algorithm that produces the 3D effect:
XA=10*COS(A1)-Y*SIN(A1):
YA=X*SIN(A1)+Y*COS(A1)
XB=XA*COS(A2)-Z1*SIN(A2)
ZA=XA*SIN(A2)+Z1*COS(A2)
ZB=ZA*COS(A3)-YA*SIN(A3)
YB=ZA*SIN(A3)+YA*COS(A3)
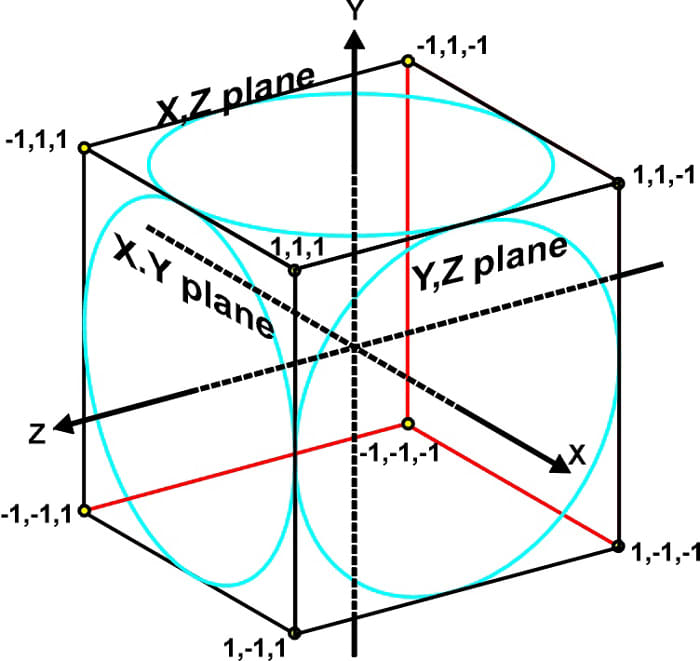
Fig. 9. A cube is a 3D object.
Using the Equations for the 4D Figure
By expanding these two equations into 12 equations and using points indicated by 4 numbers, nosotros produce a 2D representation of a 4D object. By rotating any or all of the six planes of the 4D object, the representation of a four-dimensional object tin can exist viewed from whatsoever angle.
Algorithm that produces 4D image:
ZA=Z*CQS(A1)-Westward*SIN(A1)
WA=Z*SIN(A1)+West*COS(A1)
YA=Y*COS(A2)-WA*SIN(A2)
WB=Y*SIN(A2)+WA*COS(A2)
XA=X*COS(A3)-ZA*SIN(A3)
ZB=X*SIN(A3)+ZA*COS(A3)
XB=XA*COS(A4)-WB*SIN(A4)
WC==XA*SIN(A4)+WB*COS(A4)
YB=YA*COS(A5)-ZB*SIN(A5)
ZC=YA*SIN(A5)+ZB*COS(A5) :
XC=XB*COS(A6)-YB*SIN(A6)
YC=XB*SIN(A6)+YB*COS(A6)
X2=Thousand*(Ninety+XC*ZC/800+XC*WC/800)+158:REM adds perspective to 10(grand=scale)
Y2=0.8*K* (YC+YC*ZC/800+YC*WC/800)+100:REM adds perspective to y(thousand=calibration)
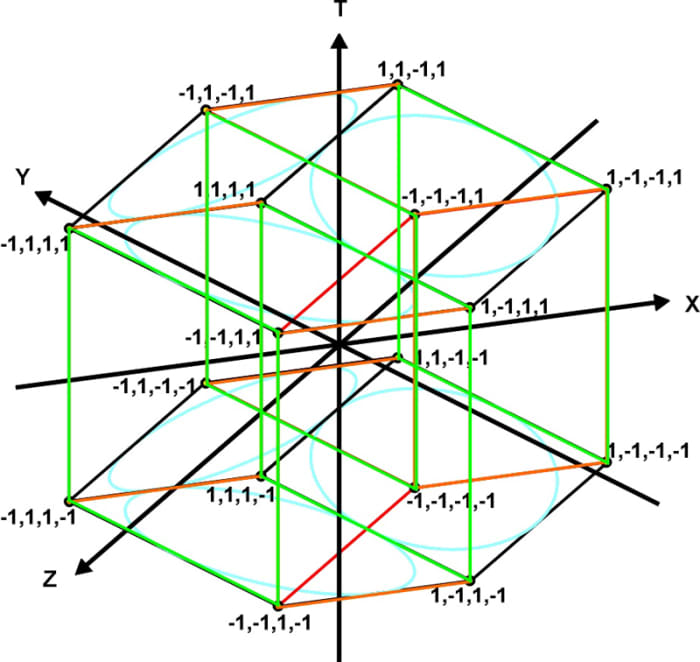
Fig. x. Tesseract or four dimensional hypercube
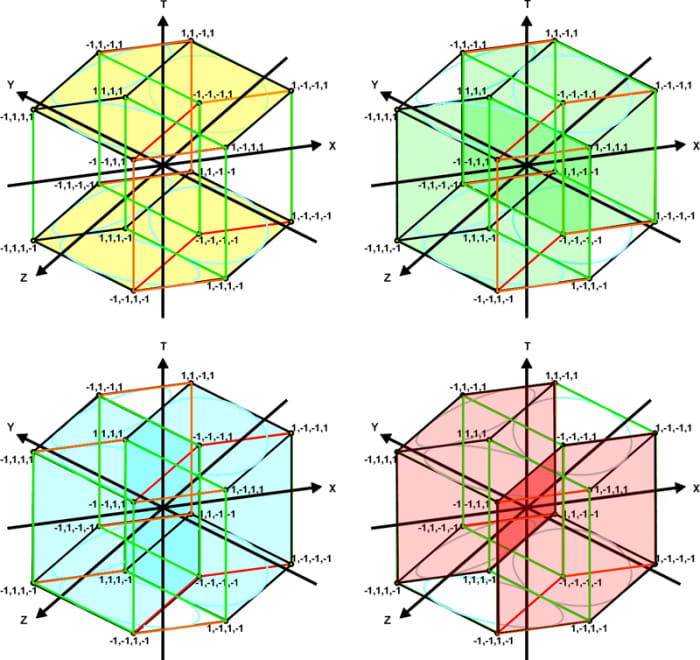
Fig. 11. The hypercube is composed eight interlaced 3D cubes
The Computer Program 4D-CUBE Draws the Tesseract
This program draws a 2-dimensional representation of a four-dimensional hypercube. Each of the xvi points or vertices are indicated by iv numbers. One number for the 10-axis, the y-axis, the z-axis and the w-axis. The 32 edges are indicated by drawing a line betwixt ii vertices.
Figs. 12 and 13 show the hypercube at different degrees of rotation. Fig. 14 shows the hypercube with no rotation around any axis. Because the program has a perspective factor in it fig. fourteen appears every bit 3 continued squares. Without perspective fig. xiv would appear as a single foursquare just as a 3D cube does. In GW Basic the height of the pixels is greater than the width. When figures are viewed on the screen they are taller than they should be. By multiplying the terminal y past 0.8, these drawings accept been adapted and then that the height and the width are proportionally corrected.
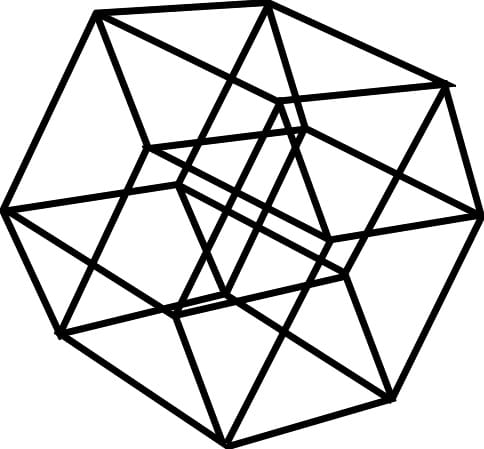
Fig. 12
4D hypercube and the rotation of each plane
ROTATION OF ZW Airplane 10°
ROTATION OF YW Airplane xx°
ROTATION OF XZ PLANE 30°
ROTATION OF XW PLANE 40°
ROTATION OF YZ PLANE 50°
ROTATION OF XY PLANE 60°
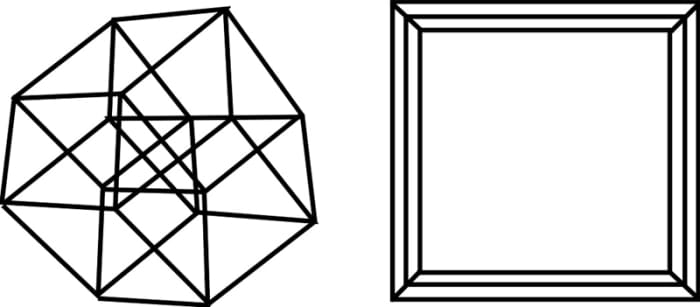
Fig. thirteen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Fig xiv
4D hypercube and rotation of planes . . . 4D hypercube and rotation of planes
ROTATION OF ZW Airplane 50° . . . . . . . . ROTATION OF ZW Airplane 0°
ROTATION OF YW PLANE 50° . . . . . . . ROTATION OF YW PLANE 0°
ROTATION OF XZ PLANE 50° . . . . . . . . ROTATION OF XZ PLANE 0°
ROTATION OF XW PLANE 0° . . . . . . . . ROTATION OF XW Airplane 0°
ROTATION OF YZ Aeroplane 0° . . . . . . . . ROTATION OF YZ Aeroplane 0°
ROTATION OF XY PLANE 0° . . . . . . . . ROTATION OF XY PLANE 0°
The Computer Program 4D-CUBE in GW Basic
100 CLS:REM 4D-CUBE 110 DIM X(300)
120 DIM Y(300)
130 DIM Z(300)
140 DIM W(300)
150 INPUT "Calibration (suggest one)";K
160 INPUT "ROTATION OF ZW Plane IN DEGREES";Al
170 INPUT"ROTATION OF YW Airplane IN DEGREES";A2
180 INPUT "ROTATION OF XZ PLANE INDEGREES";A3
190 INPUT "ROTATION OF XW PLANE IN DEGREES";A4
200 INPUT "ROTATION OF YX Plane IN DEGREES";A5
210 INPUT "ROTATION OF XY Plane IN DEGREES";A6
230 A1=A1/57.29577951 converts degrees to radians
240 A2=A2/57.29577951
250 A3=A3/57.29577951
260 A4=A4/ 57,29577951
270 A5=A5/57.29577951
280 A6=A6/57.29577951
290 SCREEN i,0: CLS:Primal OFF:Color 0,1 320 FOR N=I TO 2
330 READ X,Y,Z,W:REM reads information
340 IF Ten=ane.000 And so 530
350 ZA=Z*CQS(A1)-W*SIN(A1) :REM Algorithm that produces 4D image
360 WA=Z*SIN(A1)+W*COS(A1)
370 YA=Y*COS(A2)-WA*SIN(A2)
380 WB=Y*SIN(A2)+WA*COS(A2)
390 XA=X*COS(A3)-ZA*SIN(A3)
400 ZB=Ten*SIN(A3)+ZA*COS(A3)
410 XB=XA*COS(A4)-WB*SIN(A4)
420 WC==XA*SIN(A4)+WB*COS(A4)
430 YB=YA*COS(A5)-ZB*SIN(A5)
440 ZC=YA*SIN(A5)+ZB*COS(A5) :
450 XC=XB*COS(A6)-YB*SIN(A6)
460 YC=XB*SIN(A6)+YB*COS(A6)
470 if north=1 so 540
480 X2=K*(Ninety+90*ZC/800+XC*WC/800)+158:REM adds perspective to 10(k=scale)
490 Y2=0.8*K* (YC+YC*ZC/800+YC*WC/800)+100:REM adds perspective to y(k=scale)
500 Side by side Northward
505 IF W=40 THEN 1000: REM highlights one 3D cube
510 LINE (X1, Y1)-(X2,Y2),3:REM draws figure
520 GOTO 320
530 Terminate
540 X1=K* (90+XC*ZC/800+90*WC/800)+158:REM adds perspective to ten(thousand=scale)
550 Y1=0.8*K*(YC+YC*ZC/800+YC*WC/800)+100:REM adds perspective to y(1000=scale)
560 GOTO 500
600 Data -40,-twoscore,twoscore,-40,40,-40,40,-40
610 DATA -40, -40, xl, 40, 40, -xl, twoscore, xl
620 DATA 40,-xl,40,-xl,forty,twoscore,xl,-40
630 Data 40,-40/twoscore,twoscore,xl,40,twoscore,40
640 Data twoscore,40,40,-40,-40„forty,40,-40
650 DATA forty,40,40,40,-40,twoscore,40,40
660 DATA -40,40,40,-40,-xl,-40,forty,-xl
670 DATA -xl ,40. forty, twoscore, -40, -forty, 40, 40
680 DATA -forty,-40,-40,-xl,40,-40,-40,-40
690 DATA -xl, -40, -40, twoscore, 40, -40, -twoscore, 40
700 Information 40,-xl,-40,-40,xl,40,-forty,-40
710 Data twoscore,-40,-40, forty, 40, twoscore,-xl, 40
720 DATA xl, 40, -xl, -twoscore, -twoscore, 40, -40, -40
730 DATA 40,xl,-40,xl,-40,40,-40,40
740 DATA -40,40,-xl,-40,-40,-twoscore,-40,-40
750 Information -40,xl,-40,40,-xl,-forty,-twoscore,forty
760 Data -40, -40, 40, -40, -40,-40,-40,-40
770 Information -forty,-40,40,40,-40,-40,-twoscore,40
780 Data 40, -40, 40, -40, 40, -xl, -40, -40
790 DATA 40, -40, 40, 40, 40, -40, -40, 40
800 DATA 40, twoscore,40,-40,40,40,-40,-40
810 DATA xl,40,40,40,40,twoscore,-40,40
820 DATA -xl,40,twoscore,-xl,-forty,twoscore,-40,-40
830 Data -40, forty, 40,xl, 40 , 40, -twoscore, xl
840 Data -twoscore,-40,xl,-40,-forty,-40,40,40
850 DATA 40,-40,xl,-40,40,-twoscore, xl,twoscore
860 Data 40,40,40,-40,xl,forty,40,40
870 DATA -40,40,forty,-40,-40,40,40,40
880 DATA -twoscore,-40,-twoscore,-40,-40,-40,-40,40
890 DATA xl,-forty, -40, -forty, 40, -40, -40, 40
900 DATA 40,forty,-twoscore,-40,twoscore,40,-40,twoscore
910 Information -twoscore,40,-xl,-40,-40, 40,-twoscore, 40
920 DATA k,thousand,one thousand,1000
1000 LINE(X1,Y1)-(X2,Y2),2
1010 GOTO 320
The Computer Program 4D-Aeroplane
This program draws a 2-dimentional representation of the vi planes of the four axes. Fig. xv shows the 6 planes and the coordinates in 4D space. A layout like this is helpful before cartoon whatever 4D effigy. By using half-dozen different angles of rotation this representation of four-dimensional planes can be viewed from any angle. When all the angles are at zero we come across the x.y aeroplane equally a square. All the other planes are border-on.
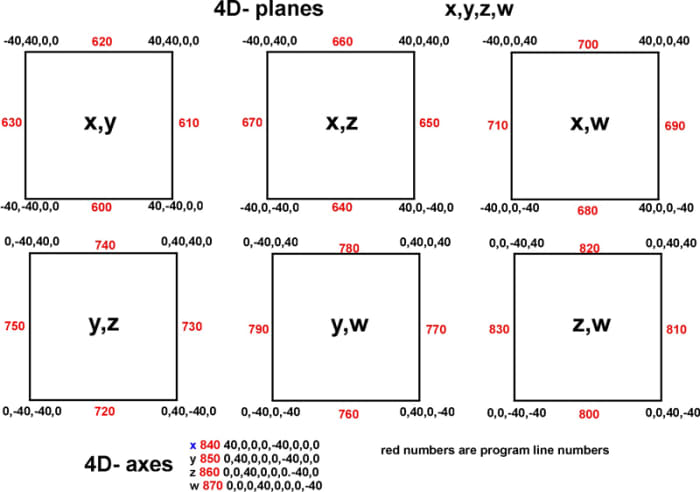
Fig fifteen. The half dozen planes of 4D space
Fig. 15 lays out all the points in the 4D coordinate system. These are used in the reckoner program 4D-Plane
In figs. xvi to 18 we see 3D planes are drawn with blue lines, while all the planes containing the w-axis are fatigued in red. When we run the computer program the 3D planes are drawn with white lines while all the planes containing the w-axis are drawn in royal. In GW Basic the acme of the pixels is greater than the width. When figures are viewed on the screen they are taller than they should be. Past multiplying the final y by 0.8, these drawings have been adapted so that the height and the width are proportionally corrected.
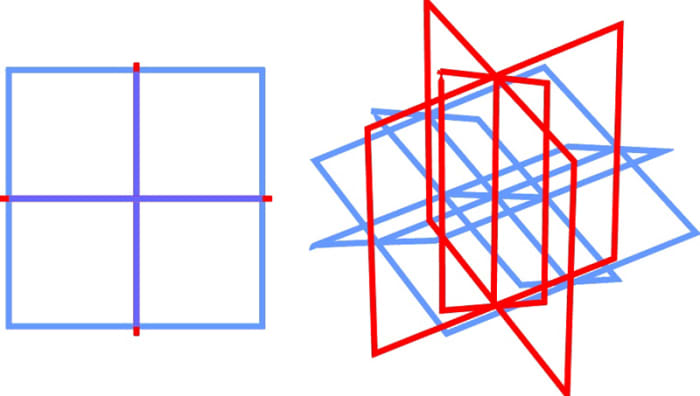
Fig.16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . Fig. 17
4D planes and the rotation of planes 4D planes and the rotation of planes
ROTATION OF ZW Airplane 0° . . . . . . . . ROTATION OF ZW Airplane 0°
ROTATION OF YW Airplane 0°. . . . . . . . ROTATION OF YW Plane 0°
ROTATION OF XZ PLANE 0° . . . . . . . . ROTATION OF XZ Plane 30°
ROTATION OF XW PLANE 0° . . . . . . . ROTATION OF XW Airplane 50°
ROTATION OF YZ Plane 0° . . . . . . . .ROTATION OF YZ Airplane lxx°
ROTATION OF XY Airplane 0° . . . . . . . . ROTATION OF XY PLANE 90°
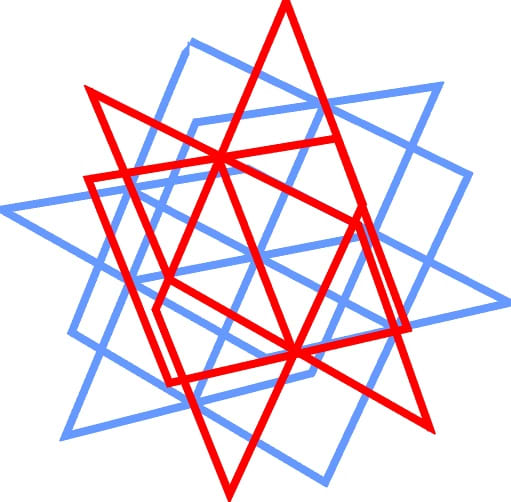
Fig. 18
4D coordinate planes and the rotation of each plane
ROTATION OF ZW Aeroplane 10°
ROTATION OF YW Aeroplane 20°
ROTATION OF XZ Aeroplane thirty°
ROTATION OF XW Airplane twoscore°
ROTATION OF YZ Aeroplane 50°
ROTATION OF XY PLANE 60°
This effigy is complex and difficult to visualize. To help in the visualization of this effigy, fig. nineteen is separated into two parts. First are the 3D planes with the x,y,z centrality. Second are the planes containing the due west axis.
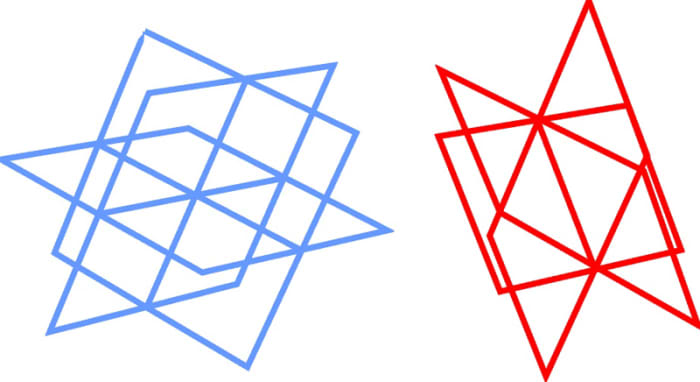
Fig. 19. Two parts of a 4D coordinate system.
Computer Program 4D-Plane
100 CLS:REM 4D-Airplane
110 DIM XC300) . 120 DIM Y(300) 130 DIM Z(300) 140 DIM W(300) 150 INPUT "SCALE";K
160 INPUT "ROTATION OF ZW Airplane IN DEGREES";Al
170 INPUT "ROTATION OF WY PLANE IN DEGREES";A2
180 INPUT "ROTATION OF XZ Aeroplane IN DEGREES"; A3
190 INPUT "ROTATION OF XW Airplane IN DEGREES";A4
200 INPUT "ROTATION OF YZ PLANE IN DEGREES";A5
210 INPUT "ROTATION OF XY PLANE IN DEGREES";A6
230 A1=A1/57. 2957795* :REM converts degrees to radians
240 A2=A2/57.29577951*
250 A3 =A3/57. 29577951*
260 A4=A4/57.29577951*
270 A5=A5/57,29577951*
280 A6=A6/57.29577951*
290 SCREEN 1,0:CLS:Primal OFF:Color 0,ane
320 FOR.Due north=one TO 2
330 READ X,Y,Z,Westward
340 IF 10=1000 Then 530
350 ZA=Z*COS(A1)-West#SIN(A1):REM algorithms to produce second representation of 4D object
360 WA=Z*SIN(A1)+W*COS(A1)
370 YA=Y*COS(A2)-WA*SIN(A2)
380 WB=Y*SIN(A2)+WA*COS(A2)
390 XA=Ten*COS(A3)-ZA*SIN(A3)
400 ZB=Ten*SIN(A3)+ZA*COS(A3)
410 XB=XA*COS(A4)-WB*SIN(A4)
420 WC=XA*SIN(A4)+WB*COS(A4)
430 YB=YA*COS(A5)-ZB*SIN(A5)
440 ZC=YA*SIN(A5)+ZB*COS<A5)
450 90=XB*COS(A6)-YB*SIN(A6)
460 YC=XB*SIN(A6)+YB*COS(A6)
470 IF N=l THEN 540
480 X2=Yard*(Ninety+XC*ZC/800+XC*WC/800)+158
490 Y2=0.8*M*(YC+YC*ZC/800+YC*WC/800)+100
500 NEXT Northward
505 IF W= 40 OR W= -40 Then grand
510 LINE (X1,Y1)-(X2,Y2),3
520 GOTO 320
530 END
540 X1=1000*(XC+Xc*ZC/800+Ninety*WC/800)+158
550 Y1=0.8*K*(YC+YC*ZC/8OO+YC*WC/800)+100
560 GOTO 500
600 DATA - twoscore,- 40„0,0 , xl,- xl,0,0
610 DATA forty,- 40,0,0,40,40,0,0
620 Data twoscore,40,0,0,-40,forty,0,0
630 Data - 40,xl,0,0,- 40,- xl,0,0
640 DATA - forty ,0,40, 0, 40, 0., - forty, 0
650 DATA forty, 0,- 40,0,forty,0, 40,0
660 Data - 40,0,forty,0 , 40,0,xl, 0
670 Data - 40, 0, 40, 0, - twoscore, 0, - 40, 0
680 DATA 0, - 40, - 40, 0, 0, forty, - 40, 0
690 DATA 0,twoscore,- 40,0,0,40,40,0
700 DATA 0,40,40,0,0, - forty, twoscore, 0
710 DATA 0,- 40, 40, 0,0,- 40,,- 40,0
720 Information - 40,0,0,- 40,40,0,0,-40
730 DATA 40,0,0,- 40,40,0,0,40
740 Data forty,0,0,40,- xl,0,0,40
750 DATA - 40,0.0,40,- xl,0,0,- forty
760 DATA 0,- 40,0,- xl,0,40,0,- twoscore
770 DATA 0,0, 0, - 40 , 0, forty, 0, twoscore
780 DATA 0,xl.0, 40,.0,40,0,twoscore
790 Information 0, -40, 0, 40, 0, -twoscore,, 6, - 40
800 Information 0,0, xl, - xl, 0, 0, - twoscore, - 40
810 Information 0,0,twoscore, 40, 0., 0, xl, - xl
820 DATA 0,0, 40, xl, 0, 0, - 40, 40
830 DATA 0,0,- iv,40,0,0,- 40,- 40
840 Data 40, 0, 0, 0, - 40, 0, 0.0
850 Information 0,40,0,0,0,- 40,0,0
860 Data 0,0,forty,0,0,- 40,0
870 DATA 0,0,0,xl,0,0,0,- forty
920 Data m,1000,g,1000
1000 LINE (X 1, Y1) – (X2, Y2) , 2
1010 GOTO 320
This program has built-in perspective, and so that lines more than altitude from the eye are smaller. To remove this perspective change lines 480, 490, 540, and 550 to:
480 X2=Yard*(Xc)+158
490 Y2=K*(YC)+100
540 X1=1000*(XC)+158
550 Y1=K*(YC)+100
This is also truthful for the previous program the 4D-CUBE. The perspective tin can be removed from that program by the same lines in it.
An approximate 4D drawing tin be fabricated by cartoon a 3D cartoon of an object twice. And then connecting the point with lines. Fig. twenty shows the 4D coordinate arrangement drawn this way.
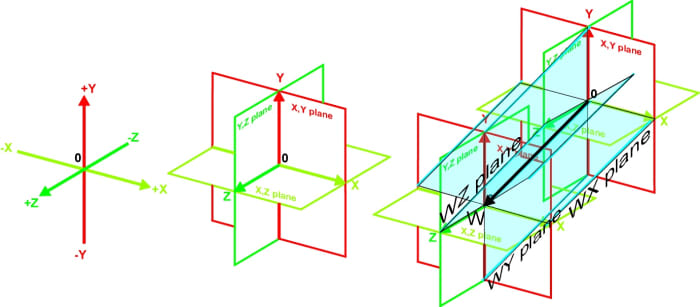
Fig. 20. Four-dimemsional coordinate system
Fig. 21 shows the 4D tetrahedron, cube and octahedron drawn this way.
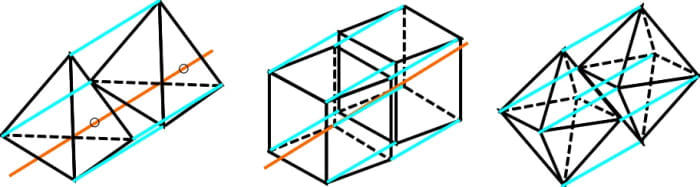
Fig. 21. Four-dimensional tetrahedron, cube and octahedron
By understanding these principles yous can draw all sorts of 4D figures. These tin be used to study and understand multiple-dimensional systems.
Fourdimensional on October 28, 2022:
Rotation in four-dimensional space.
https://youtu.be/vN9T8CHrGo8
The 5-cell is an analog of the tetrahedron.
https://youtu.be/z_KnvGGwpAo
Tesseract is a 4-dimensional hypercube - an analog of a cube.
https://youtu.be/HsecXtfd_xs
The sixteen-prison cell is an analog of the octahedron.
https://youtu.be/1-oj34hmO1Q
The 24-cell is 1 of the regular polytope.
https://youtu.be/w3-TqPXKlVk
The hypersphere is an analog of the sphere.
Mara Alexander from Los Angeles, California on February 27, 2022:
And so kewl, this is admittedly crawly. Cheers for sharing
I voted it up
Bennimus - Continuing on Oct 29, 2022:
I also forgot to mention. The connect-the-dots play tricks volition piece of work on cubes, but yous can't employ it on tetrahedrons. Y'all will go a "tetrahedronal prism". A proper 5-cell has five vertices. Aforementioned for octohedrons. It WILL Not WORK unless you desire to end upwards with a prism.
Bennimus on October 29, 2022:
About the 4D graph. There's a fleck of a blueprint in 2d representations of higher-dimensional graphs.
Generally, the Z axis goes up. In 2nd drawings, Y goes up. So where does Y go? Information technology gets squished downward a niggling chip with the X axis.
The same thing happens when we innovate what'due south properly known as a W centrality. When the W axis enters the scenario, It points up, and it squishes the Z axis alongside the Y and 10 axes.
All in all it really doesn't matter so long as you have 4 axes, but if y'all're ever going to do measurements of hypercubes, this is the easiest way to exercise information technology.
Rahul on August 01, 2022:
Its really so skillful, only i know this, can you tell me something about 4-D sphere. My name is Rahul and my age is xiv. If you lot can tell me something about 4-D sphere than please tell me, this is my ID- planetchachi@gmail.com
Cheers Sir
Casper on Dec xxx, 2022:
Excellent!, however, a 4d tetrahedron has only five corners!
In your example of a 4d tetrahedron yous have made two normal tetrahedrons connected to each other bij 90 degree angles into the time.
Zack on February 29, 2022:
I could not practise any of that! I'one thousand only in seventh grade, and dear math, and geometric shapes, simply that made no sense. Could you make that clearer, delight? my e-mail is lemanski_z@yahoo.com. Thx, Zack.
sve on February twenty, 2022:
You made it so simple, it is genius. This is the best explanation of a Key Principle I have seen. Thanks. Keep going.
p johnny joe on November 22, 2022:
sir,it was awesome to see four dimensional figure made by you,when it is going to come up in to action,can nosotros make things useful to humanbeings past these figures,100% of the things are fabricated upwards of 3dimensional,iam a mathematics instructor iam curious to know about it please write in item to my id johnnyjoe2006@yahoo.com thanks
toxiKrystal on June 06, 2022:
very articulate and concise. suprising, considering the corporeality of usefull informatin here, as well equally the circuitous nature of fourth-dimentional space itself.
i acquired useful noesis and i am certain in that location is more than to acquire here. Bookmarked for sure ^-^
... aren't 4dimentional objects stunningly cute ^-^ y'all definitely aided my job of drawing them past hand.
much thanks
-krys
Mood on May 12, 2022:
Sir you are crawly and passionate, really benefited from this commodity, thanks and go along up the awesome work coming !

Source: https://feltmagnet.com/drawing/How-to-Draw-Four-Dimensional-Figures
Posted by: smelleywhatinat.blogspot.com
0 Response to "How To Draw 4 Dimension On Graph"
Post a Comment